
Fehler tolerante Low-Cost Hybridnavigationsdesigns für zukünftige Raumtransportsysteme
| Arbeitsgruppe: | AG Optimierung und Optimale Steuerung |
| Leitung: |
Prof. Dr. Christof Büskens ((0421) 218-63861, E-Mail: bueskens@math.uni-bremen.de )
Dr.-Ing. Stephan Theil |
| Bearbeitung: | Dr.-Ing. Guilherme Fragoso Trigo |
| Projektförderung: | European Space Agency NPI Programm |
| Projektpartner: |
European Space Agency DLR, Institut für Raumfahrtsysteme, Bremen Airbus Defence & Space, Bremen |
| Laufzeit: | seit 01.09.2014 |
Die on-board Navigation europäischer Trägerraketen erfolgt zurzeit durch reine Trägheitsnavigation, d.h. über die Propagation der Messungen von Inertialsensoren. Typisch für solche Systeme ist ein stetig wachsender Fehler, verursacht durch Sensordrift und Störeffekte wie Ruck, Schock und Vibrationen. Daher müssen in solchen Systemen eingesetzte Sensoren von höchster Güte sein, diese sind jedoch im Allgemeinen groß, schwer und sehr teuer. In Anbetracht der dennoch limitierten Genauigkeit werden die Aufstiegsbahnen von Trägersystemen aus Sicherheitsgründen durch ein am Boden befindliches Trackingsystem verfolgt. Aus dem Blickwinkel der Performance betrachtet verursachen die geringen Genauigkeiten der on-board Navigationssysteme Bahnfehler, welcher durch die Payload über Manöver mit hohem Delta-V korrigiert werden müssen.
Ein möglicher Weg um die Fehler von reinen Inertialnavigationssystemen zu verringern ist die Kombination mit nicht inertialen Sensoren. Ein häufiger Ansatz ist die zusätzliche Verwendung von GNSS Empfängern. Niederfrequente GNSS Messungen können zur regelmäßigen Korrektur der durch Inertialsensoren verursachten Drift verwendet werden. Im Verbund mit GNSS sorgen die hochfrequenten inertialen Messungen einer IMU für eine kontinuierliche Posenschätzung zwischen den GNSS Messungen und bei eventuellen Aussetzern von GNSS Messungen.
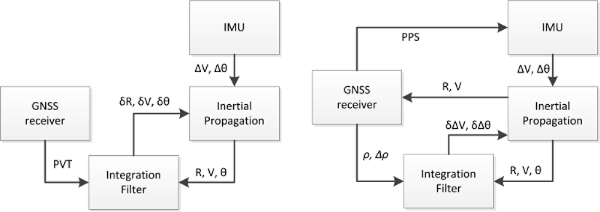
Für die Integration der oben beschriebenen beiden Messysteme wird der Begriff Hybridnavigation verwendet und kann in verschiedenen Formen realisiert werden. Die Spannbreite bewegt sich von loosely coupled Systemen, welche die fertigen Messwerte beider Sensoren fusionieren, zu ultra-tightly coupled Systemen, in denen die Rohdaten beider Sensoren zur gegenseitigen Unterstützung verwendet werden, um dann eine Datenfusion durchzuführen.
Im Gegensatz zur häufigen Verwendung von Hybridnavigationssystem in bodengebundenen Anwendungen und in der Luftfahrt, werden sie in der Raumfahrt und insbesondere bei europäischen Trägersystemen wenig eingesetzt. Das ist begründet in den hohen Anforderungen an Robustheit gegenüber den hochdynamischen Eigenschaften eines Trägersystems und den Umweltbedingungen im Weltraum.
Das Ziel des Projekts ist die Untersuchung verschiedener Architekturen von Hybridnavigationssystemen und Filteralgorithmen zur Anwendung in einem Raumtransportsystem. Das Ergebnis der Arbeit soll das Design eines Navigationssystems sein, welches eine hohe Genauigkeit der Zustandsschätzung aufweist, Kosten gegenüber herkömmlichen Systemen reduziert und gleichzeitig den Anforderungen an Robustheit, Integrität und Fehlertoleranz eines Raumtransportsystems genügt. Das fertige Design wird in einer Hardware-in-the-Loop Umgebung unter Verwendung repräsentativer Aufstiegsbahnen von SHEFEX 2, Ariane 5 und Vega getestet werden.