
Schwingungsfreie Optimalsteuerung und Regelung von Hochregallagerbediensystemen in der Logistik
| Arbeitsgruppe: | AG Optimierung und Optimale Steuerung |
| Leitung: | Prof. Dr. Christof Büskens ((0421) 218-63861, E-Mail: bueskens@math.uni-bremen.de ) |
| Bearbeitung: |
Dr. Matthias Knauer ((0421) 218-63863, E-Mail: knauer@math.uni-bremen.de)
Dr. Jan Vogelsang Dr. Jan Tietjen Dr.-Ing. Ramona Stach |
| Projektförderung: | Westfalia Logistics Technologies |
| Projektpartner: | Westfalia Logistics Technologies GmbH & Co. KG, Borgholzhausen |
| Laufzeit: | seit 01.10.2006 |
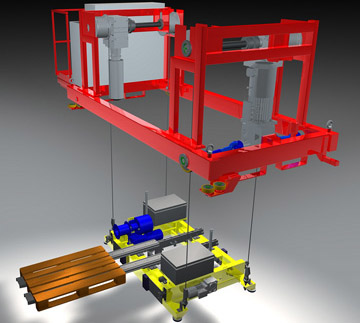
Zur Be- und Entladung von Hochregallagern werden von der Industrie meist Flurförderer oder Gabelstapler eingesetzt. Diese stellen jedoch nicht immer die beste Lösung dar, wenn hohe Lager bedient oder schwere Lasten transportiert werden sollen. Westfalia Logistics Technologies entwickelt daher den Aviator(TM). Dies soll einen Einsatz als Langseilkransystem in Lagern mit bis zu 40 m Höhe ermöglichen. Der Aviator(TM) besteht aus einer Verfahreinheit, die in der obersten Regalschiene fährt, und einem Lastaufnahmemittel, das über vier Seile mit der Verfahreinheit verbunden ist. Auf das Lastaufnahmemittel ist eine Transfereinheit für die Aufnahme und Abgabe des Transportguts montiert. Durch die leichte Bauweise wird ein geringer Verschleiß und Energieverbrauch gewährleistet. Darüber hinaus wird durch eine Reduktion der Fördertechnikkomponenten in der Lagerzone eine Senkung der Kosten ermöglicht.
Beim Transport geraten die koaxial befestigten und vertikal steuerbaren Lastaufnahmemittel jedoch in Schwingung. Diese Schwingungen sind natürlich unerwünscht, sie gilt es daher weitestgehend zu vermeiden, insbesondere müssen Schwingungen des Lastaufnahmemittels im Haltepunkt verhindert, sowie weitere sicherheitstechnische Anforderungen eingehalten werden. Der Lösungsansatz für dieses Problem basiert auf mathematischen Methoden zur Lösung verallgemeinerter optimaler Steuerprozesse für autonom agierende Systeme unter erweiterten Nebenbedingungen.
Es erfolgen neben der optimalen Bahnplanung in Echtzeit auch noch die zugehörige Regelung eines jeden Aviator(TM). Im laufenden Betrieb können durch äußere Einflüsse Abweichungen und Störungen im System auftreten. Um diese Störungen bereits während der Verfahrzeit bestmöglich kompensieren zu können, muss während der Laufzeit mit Hilfe spezieller Regelungsstrategien die aktuelle Position kontrolliert werden, um gegebenenfalls korrigierend auf die Motoren eingreifen zu können. Hierbei werden bewährte und weiterentwickelte Reglerkonzepte eingesetzt, die eine Bestimmung des Reglers im Anschluss an die Bahnberechnung ermöglichen. Der Aviator(TM) folgt der gewünschten Bahn und Störungen werden robust eliminiert. Für spezielle Fragestellungen müssen außerdem spezielle Lösungen gefunden werden. So muss der Aviator(TM) beispielsweise in der Lage sein, bei Gassen mit einem quer zur Fahrbahn verlaufenden Durchgang in einer sicheren Höhe darüber hinweg fahren zu können, oder die Geschwindigkeit am Gassenrand so zu beschränken, dass auch bei Stromausfall Kollisionen ausgeschlossen sind.
Publikationen
- C. Büskens, M. Knauer.
Higher Order Real-Time Approximations in Optimal Control of Multibody-Systems for Industrial Robots.
Multibody System Dynamics, 15(1):85-106, Springer Verlag, 2006.