
Adaptive Optimal Control of Variational Inequalities in Computational Mechanics
| Working Group: | WG Modelling and Scientific Computing |
| Leadership: |
Prof. Dr. Andreas Rademacher ((0421) 218 63831, E-Mail: arademac@uni-bremen.de)
Prof. Dr. Christian Meyer (E-Mail: christian.meyer@math.tu-dortmund.de) |
| Processor: | |
| Funding: | Teilprojekt B8 im DFG-SFB 708 3D-Surface Engineering für Werkzeugsysteme der Blechformteilefertigung - Erzeugung, Modellierung, Bearbeitung - |
| Project partner: | |
| Time period: | 15.07.2012 - 30.06.2015 |
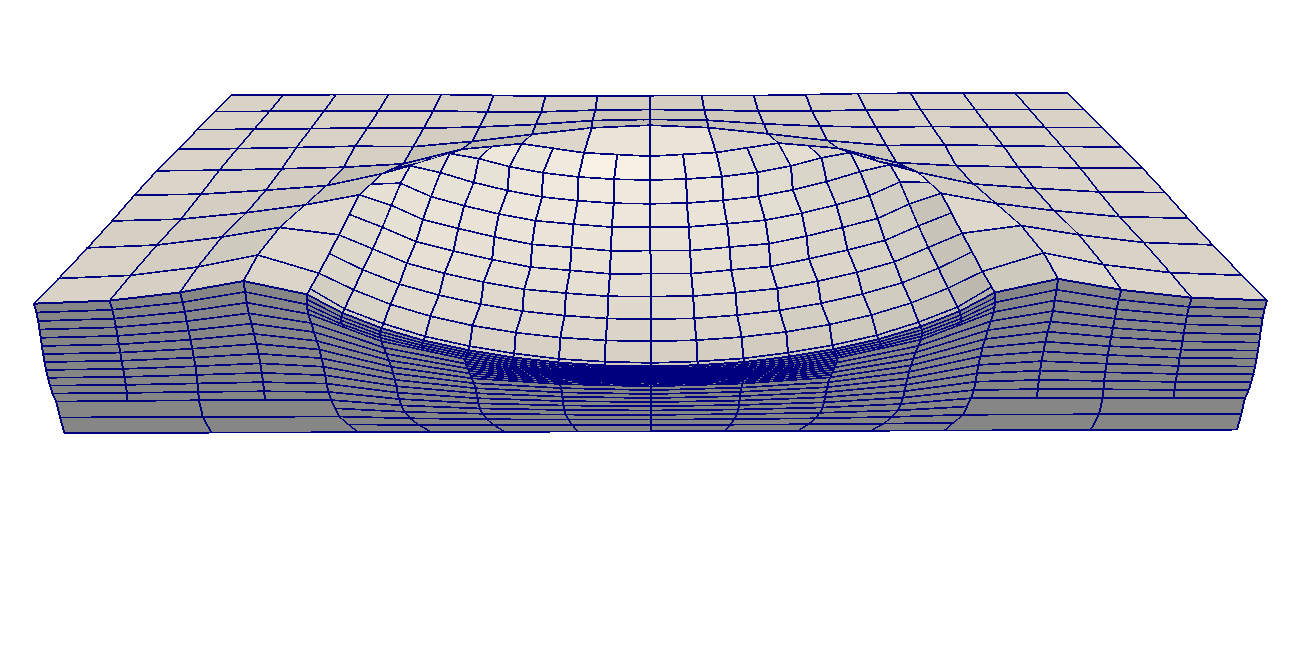 A multitude of technical applications is modelled by means of variational inequalities. As an instance we
mention the incremental rolling of thermally coated surfaces. The mechanical model associated to this process
involves the multi-body-contact between roller and workpiece as well as the plastic deformation of the
workpiece. Both effects are modelled by a variational inequality instead of a (partial) differential equation. To
ensure the success of the rolling process, the contact forces have to be sufficiently large to guarantee the
desired plastic deformation of the workpiece. On the other hand the contact forces must not surpass a certain
threshold to avoid damage of the workpiece. Moreover, technical limitations and the efficiency of the overall
process have to be taken into account. To design the process in order to accomplish these tasks leads to an
optimal control problem governed by a variational inequality.
A multitude of technical applications is modelled by means of variational inequalities. As an instance we
mention the incremental rolling of thermally coated surfaces. The mechanical model associated to this process
involves the multi-body-contact between roller and workpiece as well as the plastic deformation of the
workpiece. Both effects are modelled by a variational inequality instead of a (partial) differential equation. To
ensure the success of the rolling process, the contact forces have to be sufficiently large to guarantee the
desired plastic deformation of the workpiece. On the other hand the contact forces must not surpass a certain
threshold to avoid damage of the workpiece. Moreover, technical limitations and the efficiency of the overall
process have to be taken into account. To design the process in order to accomplish these tasks leads to an
optimal control problem governed by a variational inequality.An efficient numerical solution of such a problem requires numerical tools to simulate the process as well as optimization algorithms based on qualified optimality conditions. The goal of the proposed project is to design an algorithm to efficiently solve optimal control problems subject to variational inequalities up to a desired accuracy. To this end different error contributions have to be estimated and equilibrated. At first the use of fast derivative based optimization algorithms requires to regularize the variational inequality which induces a regularization error. Furthermore the variational inequality has to be discretized which leads to a discretization error. Based on a posteriori error estimators we will develop an adaptive algorithm which balances both error contributions and ensures an optimal reduction of the two errors. To the best of the applicants' knowledge such an algorithm has not been designed or investigated so far although it possesses multiple possible applications in particular for the optimization of mechanical systems.