
Echtzeittrajektorienberechnung für automatische Ausweichmanöver
| Arbeitsgruppe: | AG Optimierung und Optimale Steuerung |
| Leitung: | Prof. Dr. Christof Büskens ((0421) 218-63861, E-Mail: bueskens@math.uni-bremen.de ) |
| Bearbeitung: | Dr.-Ing. Hannes Meyer |
| Projektpartner: | Volkswagen AG, Volkswagen AG, Wolfsburg |
| Laufzeit: | 01.10.2014 - 31.01.2016 |
Trotz der Einführung vieler neuer Fahrerassistenzsysteme und Sicherheitsfunktionen durch die Automobilindustrie, ist die Anzahl der Unfälle im Straßenverkehr hoch. Zur Vermeidung von Kollisionen wird an automatischen Ausweichmanövern durch Lenk- und Bremseingriffe geforscht. Für diese Eingriffe sind Trajektorien zu berechnen, welche das Fahrzeug, angepasst an die aktuelle Situation, an einem möglichen Kollisionsobjekt vorbeiführen. Hier werden zeitkritische Szenarien adressiert, was eine Trajektorienplanung in Echtzeit unumgänglich macht. Für die Anforderungen an Optimalität und Echtzeitfähigkeit werden in diesem Projekt Methoden der parametrischen nichtlinearen Optimierung genutzt.
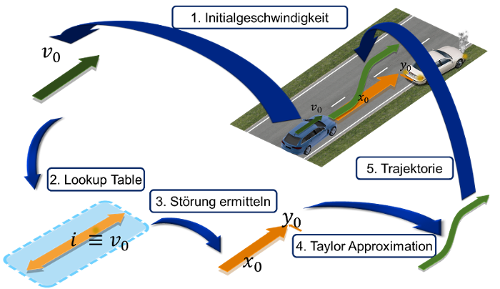
Ziel dieses Projekts ist ein möglichst generischer Trajektorienplaner. Dieser Planer soll eine Vielzahl verschiedener Szenarien abdecken, effizient Speicherplatz nutzen und dabei stets echtzeitfähig bleiben. Um dies zu erreichen werden nominelle Lösungen und parametrische Sensitivitäten eines parametrischen nichtlinearen Optimierungsproblems offline berechnet und in einer Lookup Table abgelegt. Mittels in der Modellierung berücksichtigten Störungen, können offline berechnete Lösungen durch die dazugehörigen parametrischen Sensitivitäten in Echtzeit angepasst werden. Das heißt, treten in einem Kollisionskritischen Zeitpunkt im Fahrzeug Abweichungen einiger Parameter zu den Parametern der Offlineoptimierung auf, so können diese durch vorab modellierte Störungen ausgeglichen werden.
 Trajektorie für ein Ausweichmanöver mit 70 km/h.") Abbildung einer optimalen Lösung eines nichtlinearen Optimierungsproblems zum Finden einer optimalen (Lenk- und Brems-) Trajektorie für ein Ausweichmanöver mit 70 km/h.
Abbildung einer optimalen Lösung eines nichtlinearen Optimierungsproblems zum Finden einer optimalen (Lenk- und Brems-) Trajektorie für ein Ausweichmanöver mit 70 km/h.
Die Integration dieses Trajektorienplaners in einem Versuchsfahrzeug ist bereits gelungen. Im Juli 2012 schaffte es das Volkswagen Forschungsprojekt „CABS – Collision Avoidance by Braking and Steering“ bereits mit einem einfachen ersten Szenario zu einem VIP Showevent für das obere Management bei Volkswagen.