
Autonomes Fahren am Zentrum für Technomathematik
OPA³L - Optimal Assistierte, hoch Automatisierte, Autonome und kooperative Fahrzeugnavigation und Lokalisation (2019 - heute)
Kontakt: Prof. Dr. Christof Büskens
Das Team









Förderung
Projektpartner
Das Thema OPA³L wird an der Universität Bremen von drei Arbeitsgruppen bearbeitet:- Arbeitsgruppe Optimierung und Optimale Steuerung (Koordination)
- Arbeitsgruppe cognitive neuroinformatics
- Arbeitsgruppe Computergraphik und virtuelle Realität
AO-Car: Autonome, optimale Fahrzeugnavigation und -steuerung im Fahrzeug-Fahrgast-Nahbereich für den städtischen Bereich (2016-2018)
Kontakt: Prof. Dr. Christof Büskens
Als großer deutscher Automobilstandort möchte das Land Bremen diesen Weg begleiten und Themen rund um das autonome Fahren besonders fördern.
Ziel von AO-Car ist die Entwicklung von autonomen und optimalen und damit sicheren Fahrmanövern für (Elektro-)Autos im Stadtverkehr. Dabei sollen unterschiedliche Manöver, die besonders im fahrgastspezifischen Assistenzbereich relevant sind, modelliert, auf einem realen Fahrzeug bestmöglich umgesetzt und getestet werden. Zu solchen Manövern gehören echtzeitfähige Brems- und Ausweichstrategien, automatisches Einparken, selbständige Parkplatzsuche, Engstellenassistenten, Brems- und Fahrspurassistenten.
 AO-Car: Transfer von Weltraumtechniken in Anwendungen auf der Erde
AO-Car: Transfer von Weltraumtechniken in Anwendungen auf der Erde
Zeitleiste
 19. Mai 2017: Der Senator für Verkehr überreicht die Ausnahme-Fahrerlaubnis
19. Mai 2017: Der Senator für Verkehr überreicht die Ausnahme-Fahrerlaubnis
- September 2016: Projektbewilligung
- Dezember 2016: Anschaffung
- Januar-März 2017: Erweiterung der Sensorik
- April 2017: TÜV-Zulassung für umgebautes Auto
- 19. Mai 2017: Übergabe Ausnahme-Fahrerlaubnis
- 23.-24. September 2017: AO-Car ist auf der Forschungsmeile der maritimen Woche
- 25. September 2017: Die Projektpartner konnten den Mittelgeber in einer erfolgreichen ersten Vorführung vom positiven Stand des Projekts überzeugen.
- 28. März 2018: Präsentation der Ergebnisse der ersten Entwicklungsphase
Das Team




Förderung
Projektpartner
Das Thema AO-Car wird an der Universität Bremen von drei Arbeitsgruppen bearbeitet:- Arbeitsgruppe Optimierung und Optimale Steuerung (Koordination)
- Arbeitsgruppe cognitive neuroinformatics
- Arbeitsgruppe Computergraphik und virtuelle Realität
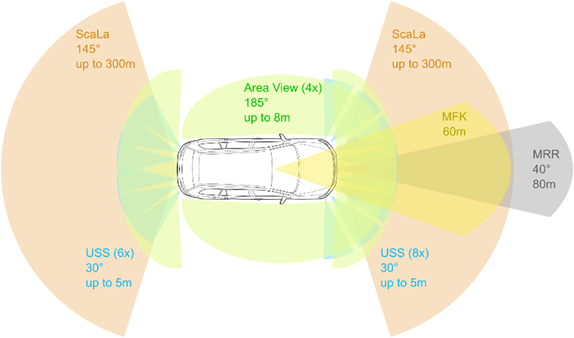
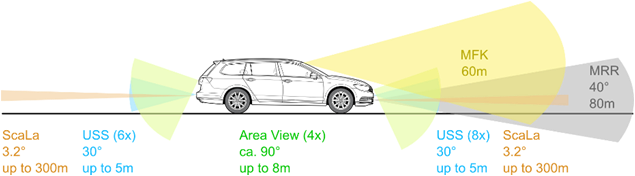
Das Fahrzeug
Ein VW Passat GTE (Plug-in-Hybrid) wurde mit zusätzlichen Sensoren ausgestattet, um zusätzliche Informationen über seine Umgebung zu erhalten. Außerdem wurde serienmäßige Sensorik freigeschaltet, damit unsere Algorithmen diese Daten verwenden können.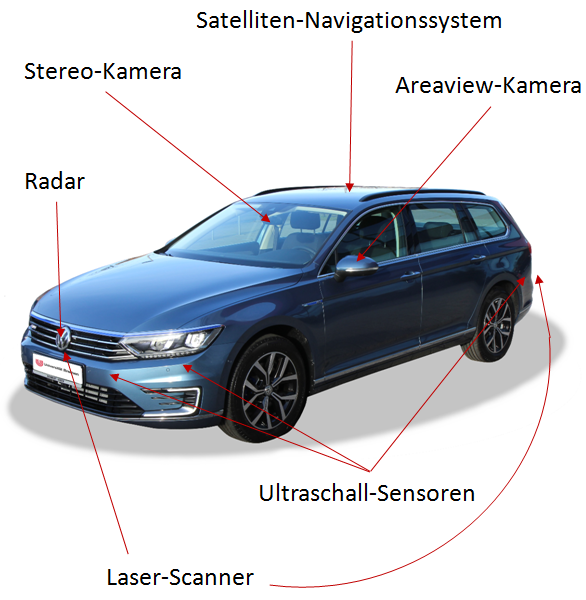
Die Steuerung
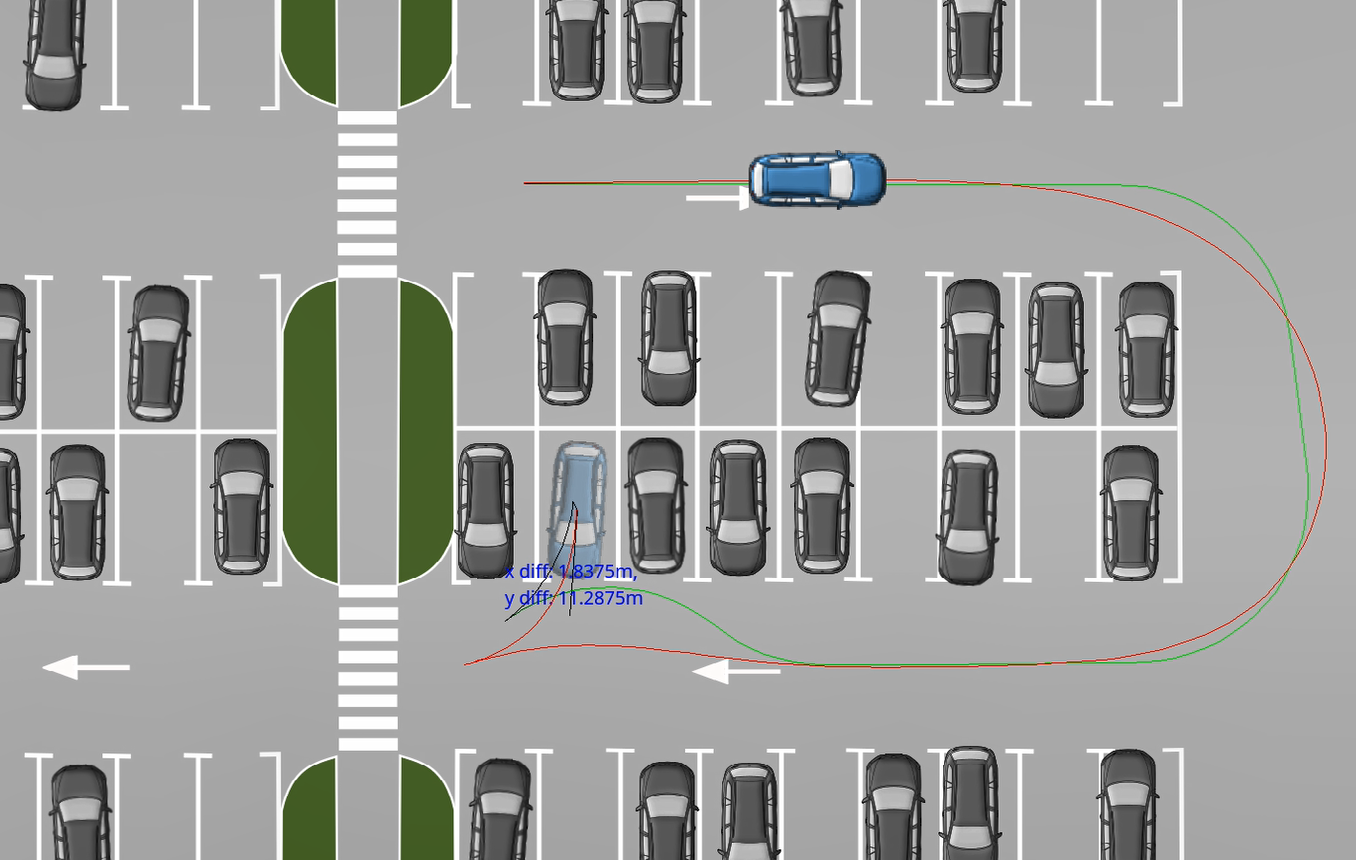
 Der in der Arbeitsgruppe entwickelte ESA-NLP-Löser WORHP berechnet optimale Fahrmanöver
Der in der Arbeitsgruppe entwickelte ESA-NLP-Löser WORHP berechnet optimale Fahrmanöver
Pressestimmen
Die vielen Anfragen von Presse und Fernsehen zeigen, dass das Thema autonomes Fahren starkes Interesse hervorruft.- 30.11.2016: Ein Plug-In-Hybrid-Auto für Uni-Wissenschaftler / Mathematiker und Informatiker bringen autonomes Fahren nach Bremen (Pressemitteilung der Uni Bremen)
- 02.12.2016: Autonomes Fahren: Neue Ansätze an der Uni Bremen (Internationales-Verkehrswesen das Technisch-Wissenschaftliche Fachmagazin)
- 09.12.2016: Uni Bremen bringt Forschung um selbstfahrende Autos voran (Osnabrücker Zeitung)
- 12.12.2016: Bremen: Universität mit Forschungsobjekt (Autonomes Fahren)
- 09.03.2017: Teststrecke für autonomes Fahren (Radio Bremen online)
- 19.05.2017: Start für autonomes Fahren in Bremen. Senator Lohse überreicht Universität Bremen Ausnahmegenehmigung (Pressestelle des Senats)
- 19.05.2017: Teststrecke für selbstfahrende Autos (Radio Bremen: Buten und Binnen)
- 20.05.2017: Bremen erlaubt autonomes Fahren (Weser Kurier)
- 22.05.2017: Uni darf autonomes Fahrzeug auf öffentlichen Straßen testen (Pressemitteilung der Uni Bremen)
- 22.05.2017: Auto ohne Fahrer auf Bremens Straßen unterwegs (Weser Report)
- 22.05.2017: Uni darf autonomes Fahrzeug auf öffentlichen Straßen testen (Technologiepark Uni Bremen)
- 03.06.2017: Selbstfahrendes Auto an der Uni Bremen (Euer Uni-Leben)
- 12.06.2017: Start für autonomes Fahren in Bremen (bremen digitalmedia)
- 24.09.2017: Dreispuriger Weserverkehr auf der Maritimen Woche (Kreiszeitung)
- 17.11.2017: Fahrerlose Autos der Zukunft: Bremer Wissenschaftler tüfteln mit (Wirtschaftsförderung Bremen)
- 24.11.2017: Fahren wie von Geisterhand (Kreiszeitung)
- 24.11.2017: Düsen bald fahrerlose Busse durch Bremen? (Weser Report)
- 27.11.2017: Autonomes Fahren (NWZ online)
- 10.12.2017: Achtung, Autonome! (Taz.de)
- 28.03.2018: Wichtige Schritte auf dem Weg zum automatisierten Fahren (Pressemitteilung der Uni Bremen)
- 28.03.2018: Wissenschaftler präsentieren selbstfahrendes Auto in Bremen (Weser Kurier)
- 28.03.2018: In Bremen fahren die Autos von allein (Weser Report)
- 28.03.2018: Erstes selbstfahrendes Auto in Bremen (Radio Bremen eins)
- 28.03.2018: Selbstfahrendes Auto (Bild)
- 29.03.2018: Forschungsprojekt selbstfahrende Autos - Lieber ohne Turbo-Boost (taz)
- 29.03.2018: Autonom über den Uni-Parkplatz (Auto Presse)
- 04.06.2019: Fahren Shuttle-Bus und Car-Sharing-Auto bald von selbst vor? (Pressemitteilung der Uni Bremen)
- 24.07.2019: Darum vermisst ein Auto mit Laserscanner ganz Borgfeld (buten un binnen)
- 24.07.2019: Borgfelds digitaler Zwilling (kreiszeitung.de)
- 26.07.2019: Autonomes Fahren: Die Vermessung Borgfelds (Weser Kurier)
- 26.07.2019: Der digitale Shuttle-Bus (Wümme-Zeitung)